|
本文介绍了 JetsonYolo,它是 CSI 摄像头安装、软件和硬件设置以及在 NVIDIA Jetson Nano 上使用 Yolov5 和 openCV 进行目标检测的简单可行的教程。 该项目使用 CSI-Camera 创建管道和获取帧,使用 Yolov5 目标检测,在 Jetson Development Kits 上实现完整且可执行的代码。 查看 CodePlay jetson nano 播放列表以获取视频说明和 JetsonYolo Github。
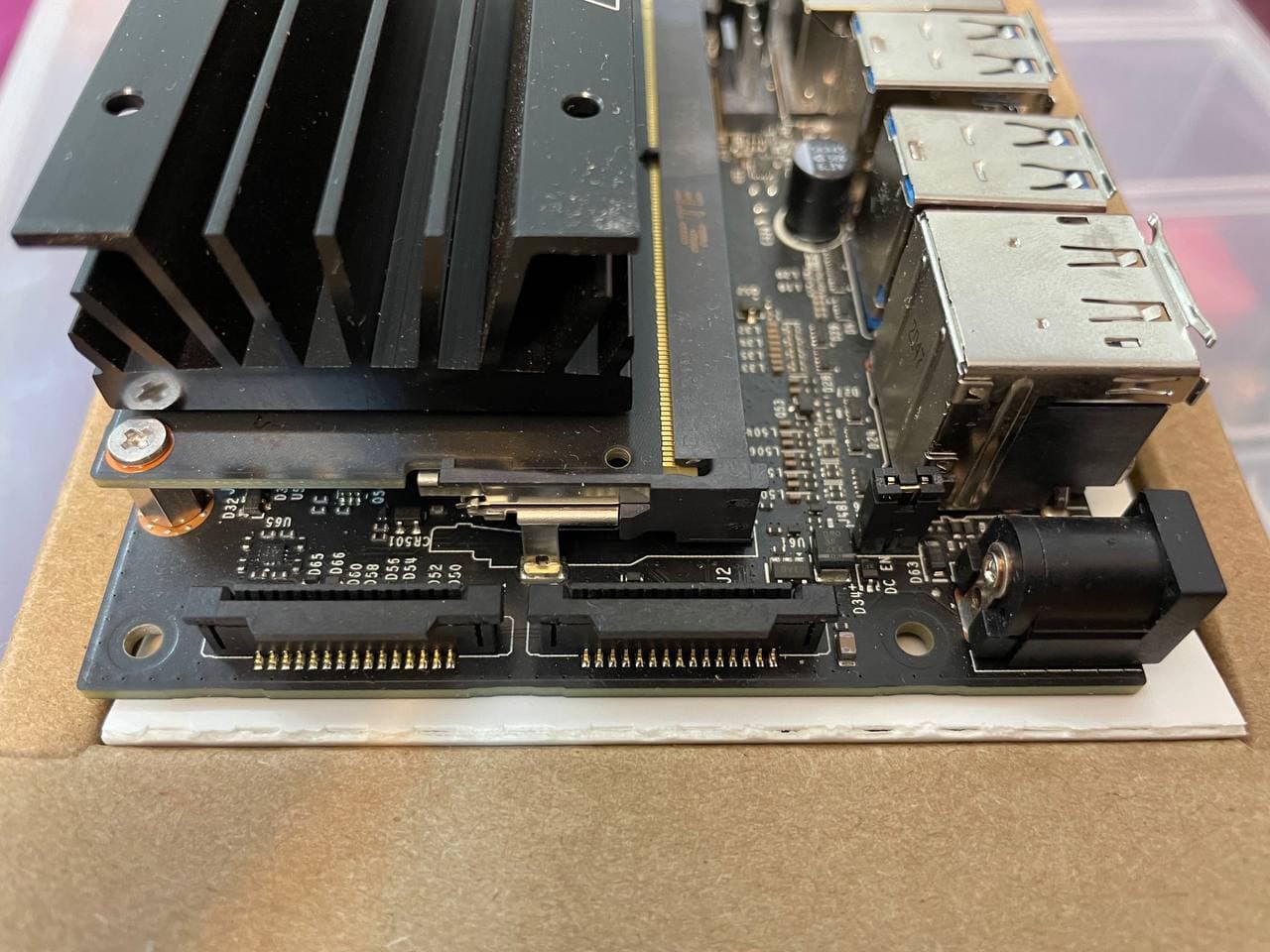
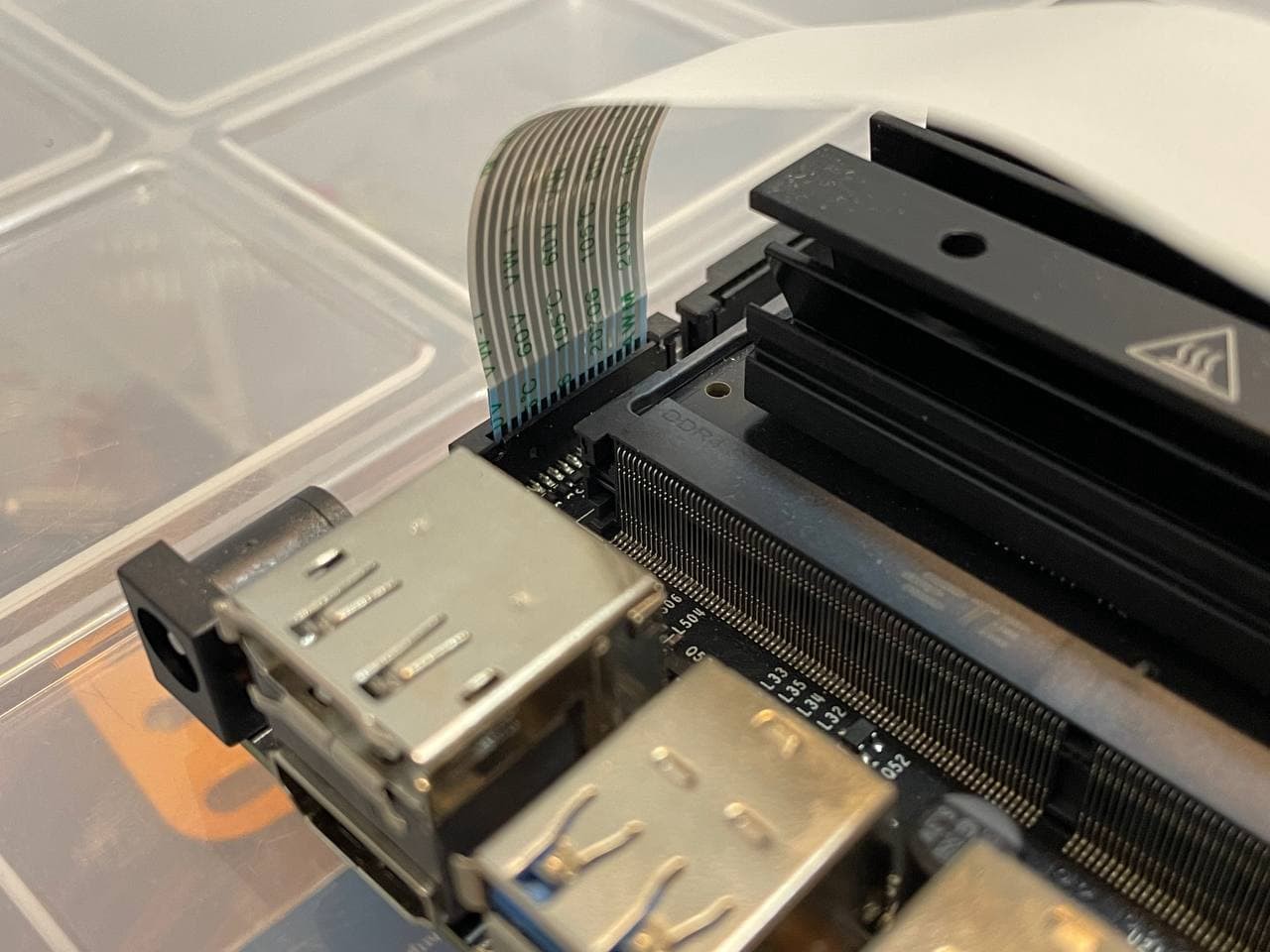
要求 与 Jetson Nano 一起使用的最常见的相机之一是 Raspberry Pi Camera Module V2,但如果您需要更高的分辨率怎么办? 最近我尝试将 Waveshare IMX477 CSI 摄像机用于一个项目,但在将其连接到电路板时遇到了问题。 最后,在尝试了几种不同的方法后,我想出了一个简单的过程。 本文由硬件、驱动程序和python库安装等几个部分组成,最后是Yolov5。 这些步骤对于使用 Jetson Nano 板上的摄像头进行物体检测都是必不可少的。 相机设置 将摄像头安装在载板上的 MIPI-CSI 摄像头连接器中。 拉起摄像头端口的塑料边缘。 推入相机色带并确保相机色带上的针脚朝向 Jetson Nano 模块。 将塑料连接器向下推。 您可以使用 Arducam 相机设置指南了解更多信息。
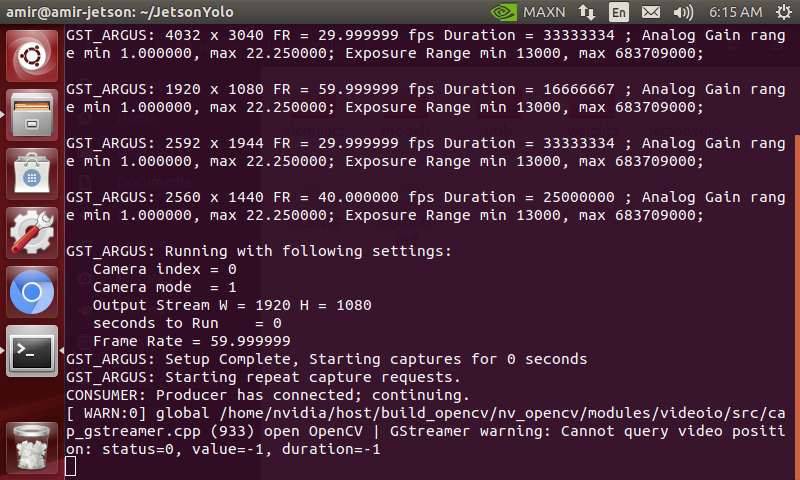
相机驱动 默认情况下,NVIDIA JetPack 支持多个具有不同传感器的摄像头,其中最著名的摄像头之一是 Raspberry Pi 摄像头 v2。 但如果您使用其他类型的相机,则需要安装传感器驱动程序。 本项目中使用了带有 IMX477-160 传感器的 12.3 MP 相机,需要额外的驱动程序才能连接。 Arducam 为带有 IMX477 传感器的相机提供易于绝缘的 IMX477 驱动程序。 (确保检查网站并使用最新的命令。) 下载自动安装脚本: 安装驱动程序: 最后,输入 y 重新启动电路板。 使用以下命令检查相机是否被正确识别。 ls /dev/video0你可以使用 JetsonHacks python 代码从使用 OpenCV 的相机获取帧。
|