|
本文主要介绍下点云处理网络pointweb。 摘要 随着深度学习的不断发展,点云也应用了深度学习网络,包括点云分类,点云分割,点云的目标检测,都达到了比较好的效果。2D深度网络和3D深度网络还是有很大区别的,对于2D图像,图像本身是规则的,所有使用传统的cnn就可以处理,但是对于3D点云来说,传统的cnn就无法处理点云,因为点云的无序与不规则,处理点云时还要处理点云的旋转不变形。以往有很多算法是将点云变化为规则的数据,然后再通过网络进行训练,但是这种方式对计算机的性能要求就比较高,很难达到实时。因此直接处理点云的网络就被提出来,pointnet是直接处理无序点云的先驱网络之一。他是通过多层感知器对点进行提取高纬空间特征,然后将提取的特征进行max-pooing。最终得到想要的特征。 对于pointent只能提取整体的特征,整个点云部分细节特征提取不好,因此又有了pointnet++网络,pointnet++是对点云的细节做了特征提取,效果得到了明显的提升。即使这样,有学者认为,pointnet++只提取了点云细节特征和整体特征,但是对于点云的位置信息特征并没有很好的提取。于是在pointnet++的基础上提出了dgcnn,dgcnn不仅提取点云的整体特征,并对点云的相对位置也进行特征提取。对于本文不同与上述方法,本文是通过在区域内,全连接所有成对点,然后提取它们的文本信息。 本文贡献:
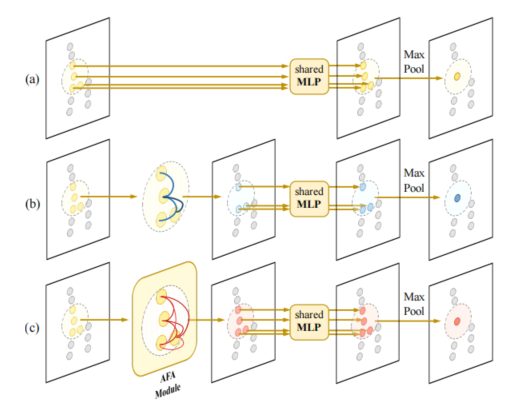
本文方法: 首先是和pointnet++,dgcnn进行对比,直观上如图所示:
pointnet++是未考虑点之间的位置关系,dgcnn考虑了点的位置关系。pointweb考虑了所有点的位置关系。 |